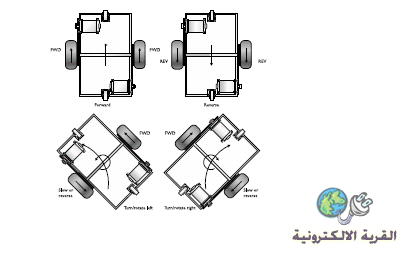
لدي روبوت متحرك ،، أريد ان أجعل به أربع عجلات ، وأن يمكنه الإلتفاف في نفس النقطة التي يقف بها ... كذلك التحكم في الحركة إلى الأمام أو الخلف او اليمين أو اليسار ،،
الفكرة تكمن في استخدام الــ pwm في ضبط سرعة كل عجلة لتنفيذ الحركة إلى الاتجاه المطلوب ،، لكنني لم أستطع حتى الآن إدارتها بالشكل المطلوب ...
إذا كان لدى حدكم فكرة معينة فليطرحها هنا للنقاش ....
علما باني أستعمل لغة c لكتابة البرنامج .
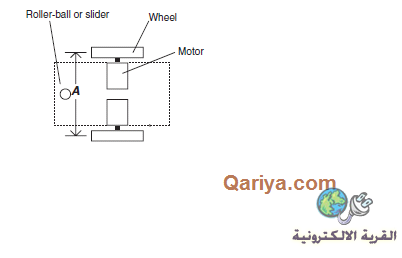
وهذا هو شكل مبسط للجزء السفلي ( القاعدة المثبت بها الروبوت ) الذي يحتوي على العجلات .
[URL=http://img845.imageshack.us/i/72688102.jpg/]






 ونقسم على 180)
ونقسم على 180)





