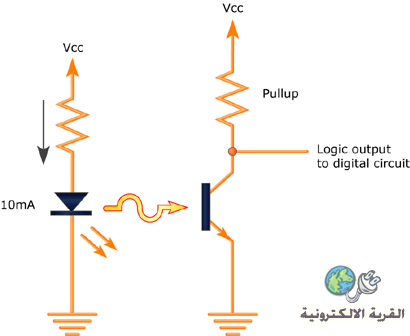
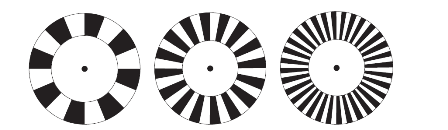
- كما نعلم فإن مايخرج من الEncoder هو سلسلة من النبضات فإذا كانت السرعة تزيد تدريجيا يقل عرض تلك النبضات تدريجيا أيضا و العكس بالعكس
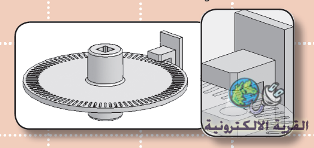
- ما على الدائرة في الحقيقة يكون شقوق متساوية في الشكل و في البعد و في كل شيئ ..... مثل ما ذكر الأخ روبوتا
- و لكن أضيف الى ذلك شقين أحدهما كبير (أكبر من الكل ) و الآخر صغير أصغر من الكل ) .
- و بالتالي فإن النبضات المولدة ستكون بالشكل الموضح أدنى الرسمة
- و بالتالي سنعرف إن كانت الحركة مع عقارب الساعة أم ضدها
- هذا إذا حسبنا التسارع في حالة زيادة السرعة أو تقليلها
- أو إذا كان التسارع يساوي صفر أي أن السرعة ثابتة
- و الباقي برمجة

- ملاحظة .... ما بين السهمين شقوق متساوية







 * قطر ال wheel )
* قطر ال wheel ) 






