ستتعلم بواسطة هذا الدرس التحكم بالمحرك الخطوي بواسطة ال(mcu)أي بواسطة المايكروكونترولر.
ولكن قبل ان تتعلم كيفية التحكم بالمحرك الخطوي عن طريق المايكروكونترولر هنالك بعض الأساسيات التي لم تكن موجودة في موضوعي السابق -الفاشل تماما-.
يوجد للمحرك الخطوي ثلاث أنواع:
1_محرك خطوي ذو مغناطيس دائم
2_محرك خطوي ذو مقاومة مغناطيسية متغيرة
3_محرك خطوي هجين
ولن أقوم بشرحها جميعاً فقط أولها إلا وهو (محرك خطوي ذو مغناطيس دائم)
المحرك الخطوي ذو مغناطيس دائم:
أولا وقبل أن أبدا بإضافة الجديد أرجو منك قراءة موضوعي القديم إذا لم تكن قرأته من قبل.
يوجد للمحرك الخطوي نوعان:
أحادي القطبية:ويكون له 6 أسلاك سلكان مشتركان للتغذية والأربعة الباقية لإرسال النبضات للتحكم بالمحرك الخطوي.
ملاحظة:قد يتصلا سلكا التغذية مع بعضهما ليشكلا سلكاً واحداً فيصبح العدد الكلي للأسلاك 5.
ثنائي القطبية:ويكون لديه 4 أسلاك.
إذا لم تفهم فانظر إلى الصورة (فالصورة اصدق أنبا من الكتبِ)
ما أريد أن أقول لك أخي المتواجد في الضيعة الالكترونية هو :إذا وجدت محرك خطوي ذو مغناطيس دائم ولم تكن تعرف نوعه إذا كان أحادي أم ثنائي القطبية فما عليك إلا النظر إلى الأسلاك فذا كان عددهم 6أو 5 فاعلم انه أحادي القطبية إما إذا كان عدد الأسلاك 4 فاعلم انه ثنائي القطبية.
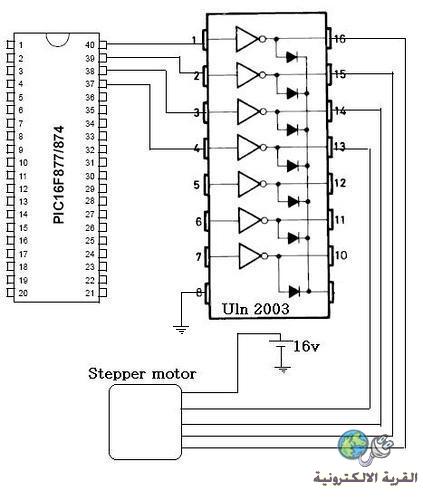
ربط المايكروكونترولر بالمحرك الخطوي
لوصل المحرك الخطوي المايكروكونترولر لن تحتاج إلا لثلاث أشياء إلا وهي المحرك الخطوي والمتحكم والايسي uln2003
اما الكود فها هو بين يديك والكود بسيط جداً ولا يحتاج شرح مطلقاً
كود:
void main()
{
TRISB = 0;
PORTB = 0;
for (;;)
{
PORTB=0b10000000;
delay_ms(20);
PORTB=0b01000000;
delay_ms(20);
PORTB=0b00100000;
delay(20);
PORTB=0b00010000;
delay_ms(20);
}
الكود التالي تعكس حركة الدوران
[CODE]
void main()
{
TRISB = 0;
PORTB = 0;
for (;
{
PORTB=0b00010000;
delay_ms(20);
PORTB=0b00100000;
delay_ms(20);
PORTB=0b01000000;
delay_ms(20);
PORTB=0b10000000;
delay_ms(20)}
}
[/CODE
ارجو من الأخوة الذين يستخدمون لغات برمجة غير المايكرو سي ارسال رسالة بالخاص الي لاتساعد معه لانشاء الكود بلغته البرمجية.











