السلام عليكم
انا عندي مشروع روبوت على شكل سيارة بتحكم في عن بعد لكن قبلها عملت كود عشان اتاكد من انو كل فنكشن بيقوم بوظيفتوا
المشكله forward , backward تمام شغالين الول مع عقارب الساعه والتانيه عكس عقارب الساعه
لكن يوم اجي لليمين واليسار على حسب معرفتي انو المفروض لمن اطلب امر اليمين
العجلة بجهه اليمنى تتحرك عكس عقارب الساعه واليسرى مع عقارب الساعه
ولمن اضغط يسار الجهه اليمنى من الموتور يكون باتجاه عقارب الساعه واليسرى عكس
لكن انا يكون العكس لمن اضغط يمين الجهه اليمنى يروح مع عقارب الساعه واليسرى عكس عقارب الساعه
كود:
const int IN1=4;
const int IN2=5;
const int IN3=6;
const int IN4=7;
void setup() {
// fIRST , define the Motor's pin as an OUTPUT
pinMode( IN1 ,OUTPUT);// Right Motor 1st wire
pinMode( IN2 ,OUTPUT);// Right Motor 2nd wire
pinMode( IN3 ,OUTPUT);// left Motor 1st wire
pinMode( IN4 ,OUTPUT);// left Motor 2nd wire
Serial.begin(115200);
}
void FORWARD(int Speed){
analogWrite(IN1,0);
analogWrite(IN2,Speed);
analogWrite(IN3,Speed);
analogWrite(IN4,0);
}
void BACKWARD(int Speed){
analogWrite(IN1,Speed);
analogWrite(IN2,0);
analogWrite(IN3,0);
analogWrite(IN4,Speed);
}
void RIGHT(int Speed){
analogWrite(IN1,Speed);
analogWrite(IN2,0);
analogWrite(IN3,Speed);
analogWrite(IN4,0);
}
void LEFT(int Speed){
analogWrite(IN1,0);
analogWrite(IN2,Speed);
analogWrite(IN3,0);
analogWrite(IN4,Speed);
}
void Stop(){
analogWrite(IN1,0);
analogWrite(IN2,0);
analogWrite(IN3,0);
analogWrite(IN4,0);
}
void loop() {
FORWARD(55);delay(2000);
Stop();delay(500);
LEFT(55); delay(2000);
Stop();delay(500);
}
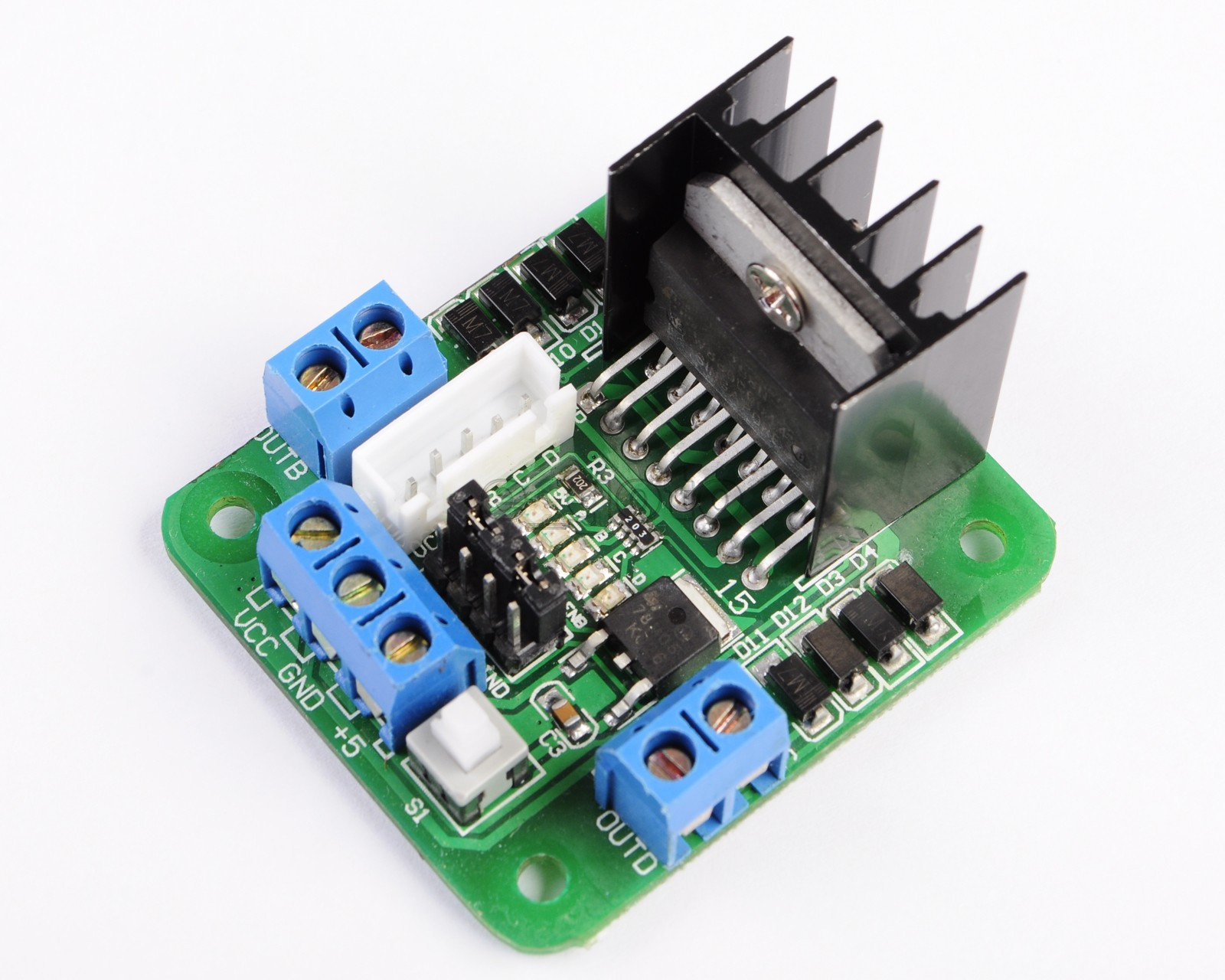
وهادا طريقة تركيبي

هل في شي عندي غلط بالكود او التركيب